
This is an API for the Augmented City (AC) platform. For more information, please visit our website https://www.augmented.city
Local coordinate system is a right-handed cartesian coordinate system of a single reconstruction. It’s based on camera coordinate system. The local camera coordinate system of an image is defined in a way that the X axis points to the right, the Y axis to the bottom, and the Z axis to the front as seen from the image.
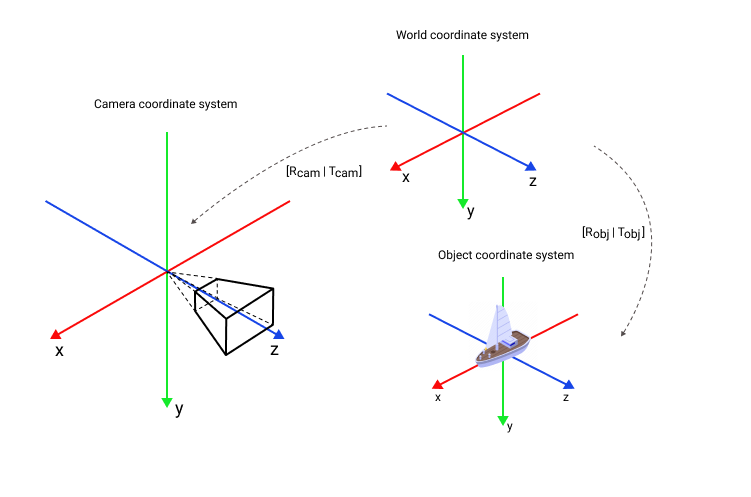
The local reconstruction coordinate system has no metric scale. Each reconstruction has a unique coordinate system with its own scale.
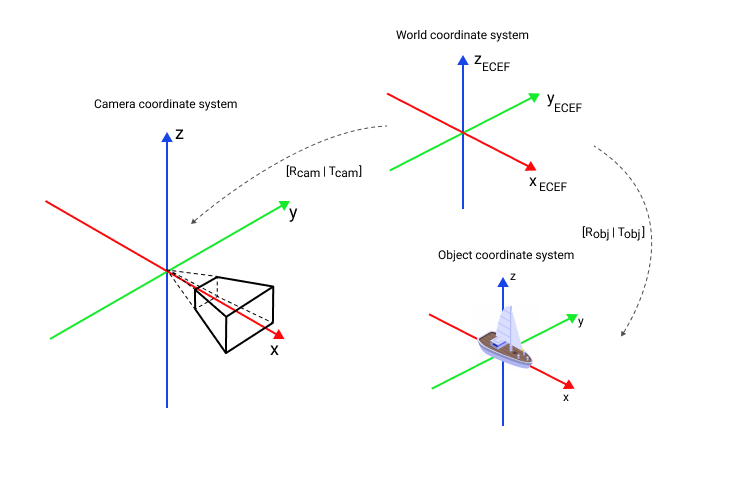
AC supports two geographic coordinate systems ECEF and ENU.
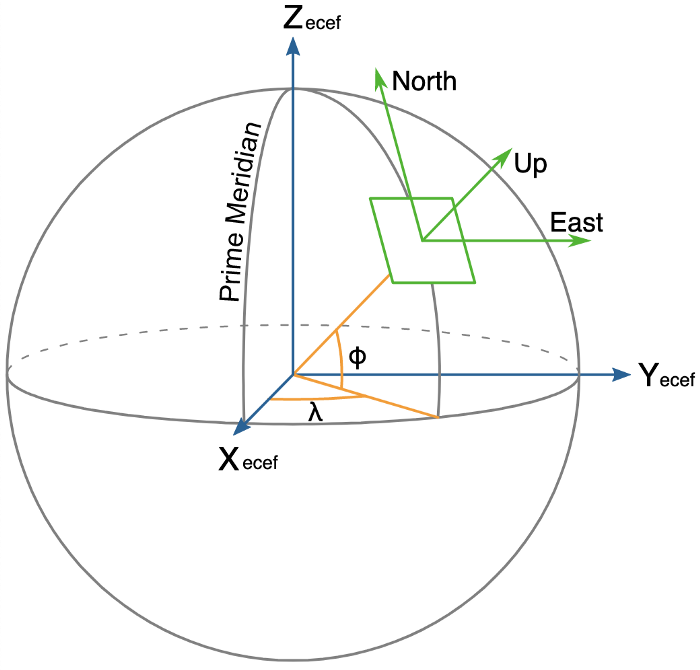
ECEF
ECEF, also known as ECR, is a geographic and Cartesian coordinate system and is sometimes known as a "conventional terrestrial" system. It represents positions as X, Y, and Z coordinates. The point is defined as the center of mass of Earth, hence the term geocentric coordinates. Read more on Wikipedia
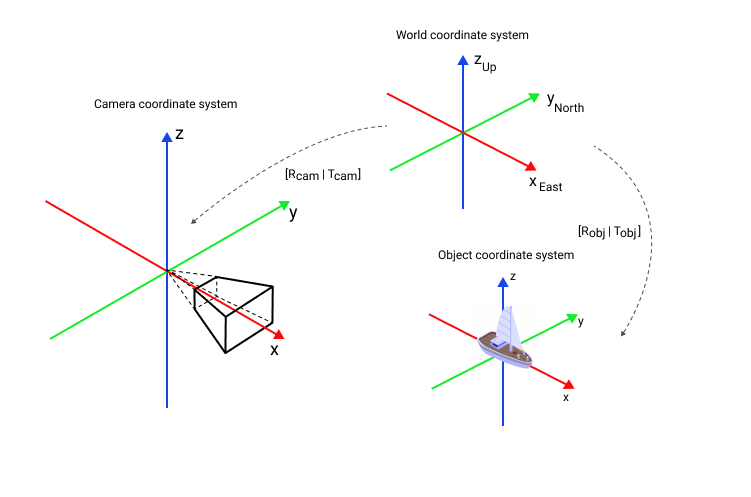
ENU
Local tangent plane coordinates (LTP) are a geographic coordinate system based on the tangent plane defined by the local vertical direction and the Earth's axis of rotation. It consists of three coordinates: one represents the position along the northern axis, one along the local eastern axis, and one represents the vertical position. The local ENU coordinates are formed from a plane tangent to the Earth's surface fixed to a specific location and hence it is sometimes known as a "Local Tangent" or "local geodetic" plane. By convention the east axis is labeled x, the north y and the up z. Read more on Wikipedia
GeoPose is a geographically-anchored pose with 6 degrees of freedom. Position is presented as WGS-84 Geodetic point, rotation is presented as quaternion in ENU coordinate system. Example:
{
"position": {
"lat": 59.93930066333559,
"lon": 30.216465340943543,
"h": 6.6434114027277181
}
"quaternion": {
"w": -0.3363841028150708,
"x": 0.6584681350287606,
"y": -0.4366714830997145,
"z": -0.5124289866630708
}
}
Position
Select a reference geodetic point (lat_ref, lon_ref, h_ref), which will be the origin of your local coordinate system. For example, this could be the first position of a camera.
Convert geodetic position of GeoPose to position in ECEF coordinate system:
import math
a = 6378137
b = 6356752.3142
f = (a - b) / a
e_sq = f * (2 - f)
# Converts WGS-84 Geodetic point (lat, lon, h) to the
# Earth-Centered Earth-Fixed (ECEF) coordinates (x, y, z).
def geodetic_to_ecef(lat, lon, h):
lamb = math.radians(lat)
phi = math.radians(lon)
s = math.sin(lamb)
N = a / math.sqrt(1 - e_sq * s * s)
sin_lambda = math.sin(lamb)
cos_lambda = math.cos(lamb)
sin_phi = math.sin(phi)
cos_phi = math.cos(phi)
x = (h + N) * cos_lambda * cos_phi
y = (h + N) * cos_lambda * sin_phi
z = (h + (1 - e_sq) * N) * sin_lambda
return x, y, z
- Convert ECEF position to ENU position:
# Converts the Earth-Centered Earth-Fixed (ECEF) coordinates (x, y, z) to
# East-North-Up coordinates in a Local Tangent Plane that is centered at the
# (WGS-84) Geodetic point (lat_ref, lon_ref, h_ref).
def ecef_to_enu(x, y, z, lat_ref, lon_ref, h_ref):
lamb = math.radians(lat_ref)
phi = math.radians(lon_ref)
s = math.sin(lamb)
N = a / math.sqrt(1 - e_sq * s * s)
sin_lambda = math.sin(lamb)
cos_lambda = math.cos(lamb)
sin_phi = math.sin(phi)
cos_phi = math.cos(phi)
x0 = (h_ref + N) * cos_lambda * cos_phi
y0 = (h_ref + N) * cos_lambda * sin_phi
z0 = (h_ref + (1 - e_sq) * N) * sin_lambda
xd = x - x0
yd = y - y0
zd = z - z0
xEast = -sin_phi * xd + cos_phi * yd
yNorth = -cos_phi * sin_lambda * xd - sin_lambda * sin_phi * yd + cos_lambda * zd
zUp = cos_lambda * cos_phi * xd + cos_lambda * sin_phi * yd + sin_lambda * zd
return xEast, yNorth, zUp
Orientation
Use quaternion as is.
Example
def geodetic_to_enu(lat, lon, h, lat_ref, lon_ref, h_ref):
x, y, z = geodetic_to_ecef(lat, lon, h)
return ecef_to_enu(x, y, z, lat_ref, lon_ref, h_ref)
geopose = {"position": {
"lat": 59.93930063661516,
"lon": 30.21646537256484,
"h": 6.6359911204808377
}
"quaternion": {
"w": 0.24078175147153705,
"x": 0.23898354967230406,
"y": -0.6720152706953141,
"z": -0.6582601971079732
}}
lat_ref = 59.93930066333559
lon_ref = 30.216465340943543
h_ref = 0.434114027277181
lat = geopose['position']['lat']
lon = geopose['position']['lon']
h = geopose['position']['h']
position_ref = geodetic_to_enu(lat_ref, lon_ref, h_ref, lat_ref, lon_ref, h_ref)
print(f"Reference ENU position: {position_ref}")
position = geodetic_to_enu(lat, lon, h, lat_ref, lon_ref, h_ref)
quaternion = [geopose['quaternion']['w'], geopose['quaternion']['x'],
geopose['quaternion']['y'], geopose['quaternion']['z']]
print(f'Object ENU position: {position}\nObject ENU orientation: {quaternion}')
Output:
Reference ENU position: (0.0, 0.0, 0.0)
Object ENU position: (0.0017677017435744347, -0.0029769590309327576, 6.201877094031028)
Object ENU orientation: [0.24078175147153705, 0.23898354967230406, -0.6720152706953141, -0.6582601971079732]
For detailed information about coordinate systems, see Geographic coordinate system.
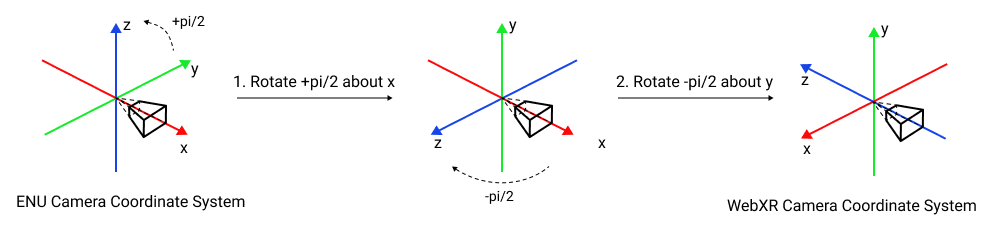
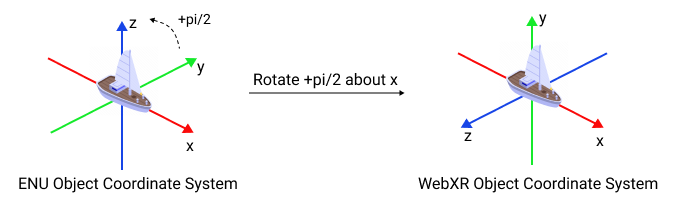
- Convert from Geopose to ENU coordinate system as shown above
- Convert from ENU, which is a right-handed, X forward, Y to the left, Z up coordinate system, to WebXR, which is also right-handed but X to the right, Y up, Z backwards coordinate system.
Check WebXR OSCP client
Camera
Object
- Convert from Geopose to ENU coordinate system as shown above
- Convert from ENU, which is a right-handed, X forward, Y to the left, Z up coordinate system, to Unity, which is a left-handed, X to the right, Y up, Z forward coordinate system.
Check OSCP Unity Client example
Camera

Object

Augmented City implementation of OSCP API
See more on https://www.openarcloud.org/oscp and https://github.com/OpenArCloud
Get camera geopose
Get camera geopose. See GeoPose
Authorizations:
Request Body schema: application/json
| id required | string (StringId) |
| timestamp required | number <double> (Timestamp_v2) The number of milliseconds since the Unix Epoch |
| type required | string Ex. geopose. Unused property |
required | Array of objects (Sensor) |
required | object (SensorReadings) |
Array of objects (GeoPoseResp) Previous geoposes. Unused property | |
object (LocalizationHint) List of reconstruction identifiers. The service will perform localization sequentially in each reconstruction according to the order specified in the list until the first successful result is obtained. If hint_only is true, the service will localize only in the specified reconstructions. If hint_only is false, the service will continue localization attempts in the nearest reconstructions |
Responses
Request samples
- Payload
{- "id": "string",
- "timestamp": 1746971109931.3477,
- "type": "string",
- "sensors": [
- {
- "id": "string",
- "type": "camera"
}
], - "sensorReadings": {
- "cameraReadings": [
- {
- "timestamp": 1746971109931.3477,
- "sensorId": "string",
- "sequenceNumber": 0,
- "imageFormat": "JPG",
- "size": [
- 0,
- 0
], - "imageBytes": "string",
- "imageOrientation": {
- "mirrored": false,
- "rotation": 0
}
}
], - "geolocationReadings": [
- {
- "timestamp": 1746971109931.3477,
- "sensorId": "string",
- "latitude": 25.000933,
- "longitude": -70.999828,
- "altitude": 7,
- "accuracy": 2,
- "altitudeAccuracy": 5,
- "heading": 0,
- "speed": 0
}
]
}, - "priorPoses": [
- {
- "id": "string",
- "timestamp": 0,
- "accuracy": {
- "position": 0,
- "orientation": 0
}, - "type": "string",
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "ecefPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "localPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "reconstruction_id": 390
}
], - "hint": {
- "reconstructions": [
- 123,
- 456
], - "hint_only": false
}
}Response samples
- 200
- 550
- default
{- "id": "string",
- "timestamp": 0,
- "accuracy": {
- "position": 0,
- "orientation": 0
}, - "type": "string",
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "ecefPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "localPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "reconstruction_id": 390
}Get camera geopose and objects scene
Get camera geopose and objects scene. See GeoPose
Authorizations:
Request Body schema: application/json
| id required | string (StringId) |
| timestamp required | number <double> (Timestamp_v2) The number of milliseconds since the Unix Epoch |
| type required | string Ex. geopose. Unused property |
required | Array of objects (Sensor) |
required | object (SensorReadings) |
Array of objects (GeoPoseResp) Previous geoposes. Unused property | |
object (LocalizationHint) List of reconstruction identifiers. The service will perform localization sequentially in each reconstruction according to the order specified in the list until the first successful result is obtained. If hint_only is true, the service will localize only in the specified reconstructions. If hint_only is false, the service will continue localization attempts in the nearest reconstructions |
Responses
Request samples
- Payload
{- "id": "string",
- "timestamp": 1746971109931.3477,
- "type": "string",
- "sensors": [
- {
- "id": "string",
- "type": "camera"
}
], - "sensorReadings": {
- "cameraReadings": [
- {
- "timestamp": 1746971109931.3477,
- "sensorId": "string",
- "sequenceNumber": 0,
- "imageFormat": "JPG",
- "size": [
- 0,
- 0
], - "imageBytes": "string",
- "imageOrientation": {
- "mirrored": false,
- "rotation": 0
}
}
], - "geolocationReadings": [
- {
- "timestamp": 1746971109931.3477,
- "sensorId": "string",
- "latitude": 25.000933,
- "longitude": -70.999828,
- "altitude": 7,
- "accuracy": 2,
- "altitudeAccuracy": 5,
- "heading": 0,
- "speed": 0
}
]
}, - "priorPoses": [
- {
- "id": "string",
- "timestamp": 0,
- "accuracy": {
- "position": 0,
- "orientation": 0
}, - "type": "string",
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "ecefPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "localPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "reconstruction_id": 390
}
], - "hint": {
- "reconstructions": [
- 123,
- 456
], - "hint_only": false
}
}Response samples
- 200
- 550
- default
{- "geopose": {
- "id": "string",
- "timestamp": 0,
- "accuracy": {
- "position": 0,
- "orientation": 0
}, - "type": "string",
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "ecefPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "localPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "reconstruction_id": 390
}, - "scrs": [
- {
- "id": "string",
- "type": "string",
- "content": {
- "id": "string",
- "type": "string",
- "title": "string",
- "description": "string",
- "keywords": [
- "string"
], - "placekey": [
- "string"
], - "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "ecefPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "localPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "size": 0,
- "bbox": "string",
- "custom_data": {
- "sticker_id": 1290,
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}, - "tenant": "string",
- "timestamp": 0
}
]
}Get SCRs covering h3Index
Get SCRs covering h3Index
path Parameters
| topic required | string |
query Parameters
| h3Index | string |
Responses
Response samples
- 200
- default
[- {
- "id": "string",
- "type": "string",
- "content": {
- "id": "string",
- "type": "string",
- "title": "string",
- "description": "string",
- "keywords": [
- "string"
], - "placekey": [
- "string"
], - "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "ecefPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "localPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "size": 0,
- "bbox": "string",
- "custom_data": {
- "sticker_id": 1290,
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}, - "tenant": "string",
- "timestamp": 0
}
]Get SCRs by GPS and radius
Get SCRs by GPS and radius
Authorizations:
query Parameters
| lat required | number <double> Latitude |
| lon required | number <double> Longitude |
| r required | number <float> Search radius, m |
| project_id | integer (ProjectId) Example: project_id=3 Project id. Return objects belonging to the specified project id. Only one project_id could be specified. Return objects belonging to the public project if project id isn't specified. |
| reconstruction_id | integer (ReconstructionId) Example: reconstruction_id=390 Reconstruction id. Return objects belonging to the specified reconstruction. Only one reconstruction_id could be specified. Return all objects around if reconstruction id isn't specified. |
Responses
Response samples
- 200
- default
[- {
- "id": "string",
- "type": "string",
- "content": {
- "id": "string",
- "type": "string",
- "title": "string",
- "description": "string",
- "keywords": [
- "string"
], - "placekey": [
- "string"
], - "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "ecefPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "localPose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "size": 0,
- "bbox": "string",
- "custom_data": {
- "sticker_id": 1290,
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}, - "tenant": "string",
- "timestamp": 0
}
]Get augmented cities list
Get the list of augmented cities. Localization is possible only inside scanned and reconstructed areas. Information about reconstructed areas will be provided in the future.
Responses
Response samples
- 200
[- {
- "city_id": 0,
- "city": "Saint Petersburg",
- "country": "Russia",
- "country_code": "RU",
- "description": {
- "circle": {
- "center": {
- "type": "Point",
- "coordinates": [
- 0,
- 0
]
}, - "radius": 0.1
}
}
}
]Get augmented city by gps
Get augmented city by gps point
query Parameters
| p_latitude required | number <double> GPS latitude |
| p_longitude required | number <double> GPS longitude |
Responses
Response samples
- 200
{- "city_id": 0,
- "city": "Saint Petersburg",
- "country": "Russia",
- "country_code": "RU",
- "description": {
- "circle": {
- "center": {
- "type": "Point",
- "coordinates": [
- 0,
- 0
]
}, - "radius": 0.1
}
}
}Create reconstruction task
Create a new task to reconstruct a series of images. The task passes to the status of waiting for image upload after creation. After receiving a signal that the images have been uploaded, the task is added to the queue for processing.
Request Body schema: application/json
| client required | string Application name | ||||||||
| daytime required | string (ScanDaytime) Enum: "DAY" "EVENING" "NIGHT"
| ||||||||
| device required | string Phone or camera model | ||||||||
| name required | string Location name | ||||||||
required | Array of objects (ScanPassages) | ||||||||
| user required | string User login or id |
Responses
Request samples
- Payload
{- "client": "AC Scanner version_name: 1.0 version_type: release",
- "daytime": "DAY",
- "device": "Mi MIX 3",
- "name": "Elm street",
- "passages": [
- {
- "style": "LINEAR_AUTO",
- "points": [
- [
- {
- "filename": "image_1.jpg",
- "camera": {
- "pose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "intrinsics": {
- "fx": 0.1,
- "fy": 0.1,
- "cx": 0.1,
- "cy": 0.1
}, - "height_above_ground_level": 0.1
}, - "geolocation": {
- "timestamp": 1746971109931.3477,
- "sensorId": "string",
- "latitude": 25.000933,
- "longitude": -70.999828,
- "altitude": 7,
- "accuracy": 2,
- "altitudeAccuracy": 5,
- "heading": 0,
- "speed": 0
}, - "gravity": {
- "x": 0,
- "y": -1,
- "z": 0
}
}
]
]
}
], - "user": "user@mail.com"
}Response samples
- 200
{- "task_id": "736fde4d-9029-4915-8189-01353d6982cb",
- "images": [
- "image.jpg"
], - "stage": "UPLOAD",
- "status": {
- "code": 0,
- "message": "Reconstructed 97 % [219 / 226]"
}, - "reconstruction_id": 390
}Upload images for reconstruction
Upload images for reconstruction. You can upload one image or a group of images at a time. To send a signal that the upload is complete, call the method without image data. After receiving such a signal that images are being uploaded, the service adds the task to the queue and changes its status to IN_QUEUE. When the status is changed, new images cannot be uploaded.
query Parameters
| task_id required | string <uuid> (ReconstructionTaskId) Reconstruction task id. Only one task_id could be specified |
Request Body schema: multipart/form-dataoptional
Image or images list. Call with no images data to finish uploading and start reconstruction
| image | string <binary> (ImageWithExif) A JPEG-encoded image, must include GPS data in EXIF tags |
Responses
Response samples
- 200
{- "task_id": "736fde4d-9029-4915-8189-01353d6982cb",
- "images": [
- "image.jpg"
], - "stage": "UPLOAD",
- "status": {
- "code": 0,
- "message": "Reconstructed 97 % [219 / 226]"
}, - "reconstruction_id": 390
}Get reconstruction task status
Get series reconstruction task status by task id. Several task ids could be specified. Return status for known task ids. Return nothing for unknown task ids.
Property reconstruction_id is available only if reconstruction is done successfully.
Property status is available after the reconstruction task has moved to the DONE stage.
Property images is available only during the UPLOAD stage. Use the property to check which images have been uploaded.
query Parameters
| task_id required | Array of strings <uuid> (ReconstructionTaskIds) [ items <uuid > ] Task id |
Responses
Response samples
- 200
[- {
- "task_id": "736fde4d-9029-4915-8189-01353d6982cb",
- "images": [
- "image.jpg"
], - "stage": "UPLOAD",
- "status": {
- "code": 0,
- "message": "Reconstructed 97 % [219 / 226]"
}, - "reconstruction_id": 390
}
]Add AR object by local pose
Add a custom object by 3d pose
Request Body schema: application/json
| reconstruction_id required | integer (ReconstructionId) Reconstruction id |
required | object (Pose) |
Array of objects (Frame3d) = 4 items | |
required | object (ObjectDescription) |
Responses
Request samples
- Payload
{- "reconstruction_id": 390,
- "pose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "frame": [
- {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}
], - "description": {
- "sticker": {
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
}Response samples
- 200
{- "objects_info": [
- {
- "placeholder": {
- "placeholder_id": "string"
}, - "sticker": {
- "sticker_id": "string",
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
], - "status": {
- "code": 0,
- "message": "string"
}
}Add AR object by geopose
Add a custom object by geopose. See GeoPose
Request Body schema: application/json
| reconstruction_id required | integer (ReconstructionId) Reconstruction id |
required | object (GeoPose) |
required | object (ObjectDescription) |
Responses
Request samples
- Payload
{- "reconstruction_id": 390,
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "description": {
- "sticker": {
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
}Response samples
- 200
{- "objects_info": [
- {
- "placeholder": {
- "placeholder_id": "string"
}, - "sticker": {
- "sticker_id": "string",
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
], - "status": {
- "code": 0,
- "message": "string"
}
}Add AR object by geopose from angles
Add a custom object by geopose from angles. See GeoPose.
Geopose rotation is expressed as a heading, pitch, and roll.
Heading is the rotation about the negative z axis. Pitch is the rotation about the negative y axis. Roll is the rotation about the positive x axis. Applied in that order.
Request Body schema: application/json
| reconstruction_id required | integer (ReconstructionId) Reconstruction id |
required | object (GeoPoseFromAngles) |
required | object (ObjectDescription) |
Responses
Request samples
- Payload
{- "reconstruction_id": 390,
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "angles": {
- "heading": 0,
- "pitch": 0,
- "roll": 0
}
}, - "description": {
- "sticker": {
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
}Response samples
- 200
{- "objects_info": [
- {
- "placeholder": {
- "placeholder_id": "string"
}, - "sticker": {
- "sticker_id": "string",
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
], - "status": {
- "code": 0,
- "message": "string"
}
}Add AR object by geopose from height above ground level
Add a custom object by geopose from height above ground level. See GeoPose.
Request Body schema: application/json
| reconstruction_id required | integer (ReconstructionId) Reconstruction id |
required | object (GeoPoseFromHagl) |
required | object (ObjectDescription) |
Responses
Request samples
- Payload
{- "reconstruction_id": 390,
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "heightAboveGroundLevel": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "description": {
- "sticker": {
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
}Response samples
- 200
{- "objects_info": [
- {
- "placeholder": {
- "placeholder_id": "string"
}, - "sticker": {
- "sticker_id": "string",
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
], - "status": {
- "code": 0,
- "message": "string"
}
}Add AR object by geopose from height above ground level and angles
Add a custom object by geopose from height above ground level and angles. See GeoPose.
Geopose rotation is expressed as a heading, pitch, and roll.
Heading is the rotation about the negative z axis. Pitch is the rotation about the negative y axis. Roll is the rotation about the positive x axis. Applied in that order.
Request Body schema: application/json
| reconstruction_id required | integer (ReconstructionId) Reconstruction id |
required | object (GeoPoseFromHaglAndAngles) |
required | object (ObjectDescription) |
Responses
Request samples
- Payload
{- "reconstruction_id": 390,
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "heightAboveGroundLevel": 0
}, - "angles": {
- "heading": 0,
- "pitch": 0,
- "roll": 0
}
}, - "description": {
- "sticker": {
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
}Response samples
- 200
{- "objects_info": [
- {
- "placeholder": {
- "placeholder_id": "string"
}, - "sticker": {
- "sticker_id": "string",
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
], - "status": {
- "code": 0,
- "message": "string"
}
}Add AR object by image
Add a custom object by marked image. The image must be localizable in the system. Before calling the method check the image with localization api.
Request Body schema: multipart/form-data
required | object (ObjectWithMarkedImage) |
| image required | string <binary> (ImageWithExif) A JPEG-encoded image, must include GPS data in EXIF tags |
Responses
Response samples
- 200
{- "objects_info": [
- {
- "placeholder": {
- "placeholder_id": "string"
}, - "sticker": {
- "sticker_id": "string",
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
], - "status": {
- "code": 0,
- "message": "string"
}
}Update AR object local pose
Update object local pose
path Parameters
| placeholder_id required | integer (PlaceholderId) Example: 1551 Placeholder id |
Request Body schema: application/json
| reconstruction_id required | integer (ReconstructionId) Reconstruction id |
required | object (Pose) |
Array of objects (Frame3d) = 4 items |
Responses
Request samples
- Payload
{- "reconstruction_id": 390,
- "pose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "frame": [
- {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}
]
}Response samples
- 200
{- "status": {
- "code": 0,
- "message": "string"
}
}Update AR object geopose
Update object geopose. See GeoPose
path Parameters
| placeholder_id required | integer (PlaceholderId) Example: 1551 Placeholder id |
Request Body schema: application/json
| reconstruction_id required | integer (ReconstructionId) Reconstruction id |
required | object (GeoPose) |
Responses
Request samples
- Payload
{- "reconstruction_id": 390,
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}
}Response samples
- 200
{- "status": {
- "code": 0,
- "message": "string"
}
}Update AR object geopose from angles
Update object geopose from angles. See GeoPose
path Parameters
| placeholder_id required | integer (PlaceholderId) Example: 1551 Placeholder id |
Request Body schema: application/json
| reconstruction_id required | integer (ReconstructionId) Reconstruction id |
required | object (GeoPoseFromAngles) |
Responses
Request samples
- Payload
{- "reconstruction_id": 390,
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "h": 0
}, - "angles": {
- "heading": 0,
- "pitch": 0,
- "roll": 0
}
}
}Response samples
- 200
{- "status": {
- "code": 0,
- "message": "string"
}
}Update AR object geopose from height above ground level
Update object geopose from height above ground level. See GeoPose
path Parameters
| placeholder_id required | integer (PlaceholderId) Example: 1551 Placeholder id |
Request Body schema: application/json
| reconstruction_id required | integer (ReconstructionId) Reconstruction id |
required | object (GeoPoseFromHagl) |
Responses
Request samples
- Payload
{- "reconstruction_id": 390,
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "heightAboveGroundLevel": 0
}, - "quaternion": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}
}Response samples
- 200
{- "status": {
- "code": 0,
- "message": "string"
}
}Update AR object geopose from height above ground level and angles
Update object geopose from height above ground level and angles. See GeoPose
path Parameters
| placeholder_id required | integer (PlaceholderId) Example: 1551 Placeholder id |
Request Body schema: application/json
| reconstruction_id required | integer (ReconstructionId) Reconstruction id |
required | object (GeoPoseFromHaglAndAngles) |
Responses
Request samples
- Payload
{- "reconstruction_id": 390,
- "geopose": {
- "position": {
- "lat": 0,
- "lon": 0,
- "heightAboveGroundLevel": 0
}, - "angles": {
- "heading": 0,
- "pitch": 0,
- "roll": 0
}
}
}Response samples
- 200
{- "status": {
- "code": 0,
- "message": "string"
}
}Update AR object content
Update AR object's content.
Request Body schema: application/json
required | Model3dData (object) or InfostickerData (object) or VideoData (object) or ImageData (object) |
Responses
Request samples
- Payload
{- "sticker": {
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}Response samples
- 200
{- "status": {
- "code": 0,
- "message": "string"
}
}Update AR object content partially
Update AR object's content partially, all properties are not mandatory. Only sent properties would be changed, others remain untouched
Request Body schema: application/json
required | Model3dDataPartialUpdate (object) or InfostickerDataPartialUpdate (object) or VideoDataPartialUpdate (object) or ImageDataPartialUpdate (object) |
Responses
Request samples
- Payload
{- "sticker": {
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}Response samples
- 200
{- "status": {
- "code": 0,
- "message": "string"
}
}Get objects list
Get objects by placeholders ids
Request Body schema: application/json
| p_placeholder_ids required | Array of integers (PlaceholderId) Placeholders ids |
| p_language | string Default: "en" Object content language |
Responses
Request samples
- Payload
{- "p_placeholder_ids": [
- 1551
], - "p_language": "ru"
}Response samples
- 200
[- {
- "placeholder": {
- "placeholder_id": 1551
}, - "sticker": {
- "created_by": "string",
- "created_date": "string",
- "changed_by": "string",
- "changed_date": "string",
- "sticker_id": 1290,
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
]Get placeholders list by gps
Get placeholders list by gps
query Parameters
| p_latitude required | number <double> GPS latitude |
| p_longitude required | number <double> GPS longitude |
| p_radius required | number <float> Search radius |
Responses
Response samples
- 200
[- {
- "placeholder": {
- "placeholder_id": 1551,
- "gps": {
- "latitude": 25.000933,
- "longitude": -70.999828,
- "altitude": 7
}
}
}
]Prepare localization session
Prepare for localization for given geolocation. Causes server to load nearby reconstructions for localization. Returns an error when localization in this location is not possible.
query Parameters
| lat required | number <double> GPS latitude |
| lon required | number <double> GPS longitude |
| alt | number <double> GPS altitude (optional) |
| dop | number <float> GPS HDOP (optional) |
Responses
Response samples
- 200
{- "status": {
- "code": 0,
- "message": "string"
}
}Localize camera
Localize uploaded image. Return camera pose and optional placeholders scene, surfaces scene and objects content. Camera, placeholders and surfaces coordinates are local coordinates in reconstruction coordinate system identified by reconstruction id.
Authorizations:
Request Body schema:
required | object (ImageDescription) Describes gps position and camera parameters |
| image required | string <binary> (Image) A JPEG-encoded image |
object (LocalizationHint) List of reconstruction identifiers. The service will perform localization sequentially in each reconstruction according to the order specified in the list until the first successful result is obtained. If hint_only is true, the service will localize only in the specified reconstructions. If hint_only is false, the service will continue localization attempts in the nearest reconstructions |
Responses
Response samples
- 200
{- "camera": {
- "pose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "intrinsics": {
- "fx": 0.1,
- "fy": 0.1,
- "cx": 0.1,
- "cy": 0.1
}, - "height_above_ground_level": 0.1
}, - "reconstruction_id": 390,
- "placeholders": [
- {
- "placeholder_id": "string",
- "pose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "frame": [
- {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}
]
}
], - "surfaces": [
- {
- "pose": {
- "position": {
- "x": 0.1,
- "y": 0.1,
- "z": 0.1
}, - "orientation": {
- "w": 1,
- "x": 0,
- "y": 0,
- "z": 0
}
}, - "frame": [
- {
- "x": 0.1,
- "y": 0.1
}, - {
- "x": 0.1,
- "y": 0.1
}, - {
- "x": 0.1,
- "y": 0.1
}, - {
- "x": 0.1,
- "y": 0.1
}
]
}
], - "objects": [
- {
- "placeholder": {
- "placeholder_id": "string"
}, - "sticker": {
- "sticker_id": "string",
- "type": "3D",
- "sticker_text": "string",
- "path": "string",
- "description": "string",
- "property1": "string",
- "property2": "string",
- "subtype": "OBJECT",
- "model_id": "string",
- "model_scale": "0.5",
- "grounded": "0",
- "vertically_aligned": "0"
}
}
], - "status": {
- "code": 0,
- "message": "string"
}
}Get resources list by filter
Get a list of resources by filter
Request Body schema: application/json
| resource_ids | Array of strings |
| types | Array of strings |
Responses
Request samples
- Payload
{- "resource_ids": [
- "string"
], - "types": [
- "string"
]
}Response samples
- 200
[- {
- "resource_id": "63bd82a9-73e2-4163-96da-bb76efef796d",
- "name": "My 3d model",
- "type": "3d",
- "created_by": "user",
- "changed_by": "user",
- "created_date": 1665354857677,
- "changed_date": 1665354857677,
- "refs": [
]
}
]Get 3d models list
Get a list of 3D models. Each 3D model has a preview image and can have several different file formats in order to use them with different platforms. 3d model has at least one file format.
query Parameters
| platform | string (Platform) Enum: "ios" "android" "uwp" Filter for platform |
Responses
Response samples
- 200
[- {
- "resource_id": "63bd82a9-73e2-4163-96da-bb76efef796d",
- "name": "My 3d model",
- "type": "3d",
- "created_by": "user",
- "changed_by": "user",
- "created_date": 1665354857677,
- "changed_date": 1665354857677,
- "refs": [
]
}
]Add 3d model
Add 3d model to server
Request Body schema: multipart/form-data
| name required | string | ||||||||
| <platform> required | string <binary> 3d model file. Possible platform names:
| ||||||||
| preview required | string <binary> A JPEG-encoded image |
Responses
Response samples
- 200
- 400
{- "id": "string",
- "status": {
- "code": 0,
- "message": "string"
}
}Update 3d model
Update 3d model at server
Request Body schema: multipart/form-data
| name | string | ||||||||
| <platform> | string <binary> 3d model file. Possible platform names:
| ||||||||
| preview | string <binary> A JPEG-encoded image |
Responses
Response samples
- 200
{- "id": "string",
- "status": {
- "code": 0,
- "message": "string"
}
}Response samples
- 200
[- {
- "resource_id": "63bd82a9-73e2-4163-96da-bb76efef796d",
- "name": "My image",
- "type": "image",
- "created_by": "user",
- "changed_by": "user",
- "created_date": 1665354857677,
- "changed_date": 1665354857677,
}
]{kind=link}
{kind=link}
Response samples
- 200
{- "resource_id": "63bd82a9-73e2-4163-96da-bb76efef796d",
- "name": "My image",
- "type": "image",
- "created_by": "user",
- "changed_by": "user",
- "created_date": 1665354857677,
- "changed_date": 1665354857677,
}Response samples
- 200
[- {
- "resource_id": "63bd82a9-73e2-4163-96da-bb76efef796d",
- "name": "My image",
- "type": "image",
- "created_by": "user",
- "changed_by": "user",
- "created_date": 1665354857677,
- "changed_date": 1665354857677,
}
]Response samples
- 200
{- "resource_id": "63bd82a9-73e2-4163-96da-bb76efef796d",
- "name": "My image",
- "type": "image",
- "created_by": "user",
- "changed_by": "user",
- "created_date": 1665354857677,
- "changed_date": 1665354857677,
}